
FW( free wheeling)与ASC(active short circuit)是驱动电机系统的两种安全状态,目的是避免电机或者整车出现非预期的转矩或者减速度。
2、何时需要进入ASC?
①控制器外部故障:断主接导致的过欠压、碰撞等
②传感器相关故障:母线电压检测、霍尔掉线、结温检测、旋变等
③执行器相关故障:IGBT开路、IGBT短路、 三相过流、 电机超速等
④算法相关故障:看门狗、扭矩监控异常、电压矢量偏差过大等
⑤外部电源故障:高压过欠压、12V过欠压、12V掉线等
⑥其他硬件故障:RAM异常、Flash异常、驱动用电源等
3、ASC工况的要求
①避免非预期大扭矩
②最大扭矩变化率在传动系统要求内
③控制器和电机不能损坏
④ 条件满足时应能从安全状态恢复
4、ASC电流
先将三相绕组通过功率模块进行短路,然后再将电机拖动至一定转速,电机的工作状态称为稳态主动短路;该特性与电机瞬态主动短路波动过程结束后的运行状态相同。
将电压方程中Ud和Uq取为0,得到稳态短路时的IdIq表达式如下:
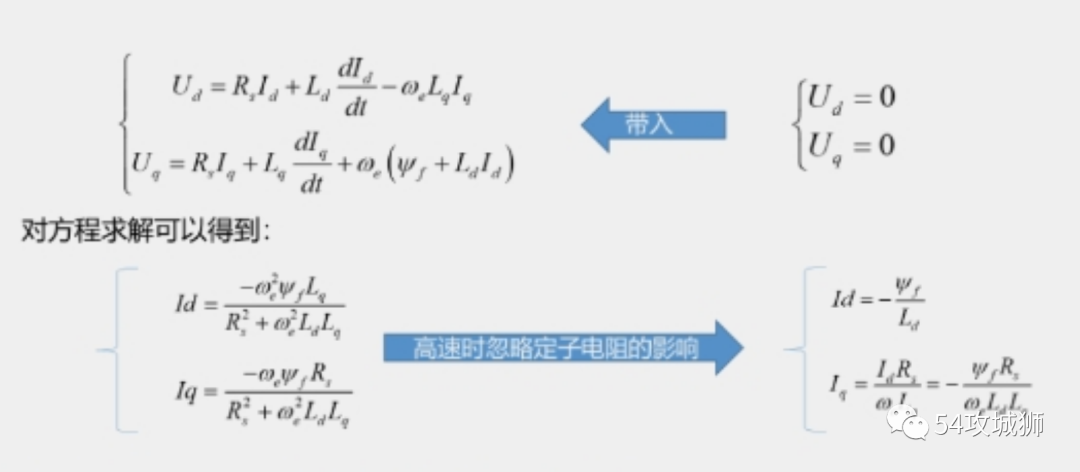
稳态时的ASC电流和转矩的曲线如下:
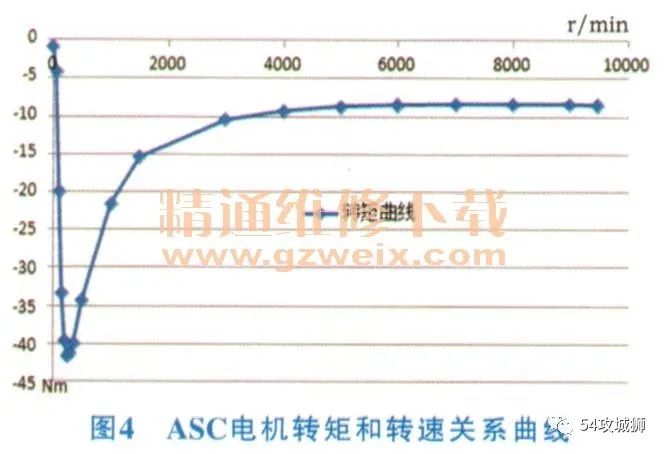
从开管运行或关管状态进入ASC时,三相电流不可避免要突变,经过短暂的衰减到稳定的状态在一定转速下,不可控整流的力矩通常很大,会引起整车明显减速。
5、ASC的执行
由于ASC执行时通常是在整车出故障的情况,所以需要保证各类故障情况下的执行动作都符合安全要求, ASC策略执行需要考虑以下方面:
(1)进入ASC瞬间的电流冲击很大,需要保证此时不会将损坏IGBT模块,在导入ASC策略之前,需要对电机特性进行摸底,实测各个工况下的电流冲击。
(2) 要控制进入ASC前的关断时间, 避免出现ASC和关管反复切换的情况,需要一些回差策略 。
(3) 发生驱动故障,某一桥臂无法执行ASC时,需要使用未发生故障的桥臂执行ASC。
( 4)进入ASC的故障,在条件满足时应退出ASC(比如硬件过压)。
(5)当控制器无ASC执行能力却需要执行ASC时,可以考虑整车将主接断开,避免产生不可控整流,影响整车安全
(6)设置策略优先级。 首先执行只需FreeWheel的故障;然后是硬件过压;再次是驱动上下桥故障、旋变故障和碰撞;最后是与速度相关的ASC。
推荐阅读:电驱系统安全状态(SPO/FreeWheeling、ASC)

学习学习
👍👍👍
👍👍👍
[…] 永磁同步机中的ASC和FW(下) […]