
前言:
最近无意间看到,有人为这份资料写了千字长文《高阶干货—一文搞懂永磁同步电机核心控制策略(千字长文)》,特此引用完善这份资料的介绍。
原文出处:新能源控制系统及MBD开发
电机的核心算法在于电流与电压的控制从而影响磁的控制,在整个链路中,有各种各样的方式方法,目标均是如何优化控制方法及最高效率,废话不多说,开整!红色字体是目录与小结,小结干货最多,建议收藏备用。
因内容较多,首先整理目录如下,千字长文,逐个开始介绍:
1、永磁同步电机原理
2、永磁同步电机控制原理
3、控制方法—最大转矩/电流控制
4、控制方法—弱磁/最大功率控制
5、控制参数设计—扭矩查表法
6、控制参数设计—电压闭环查表法
7、控制参数设计—电感/磁链参数估计
8、控制参数设计— 磁链闭环查表法
9、控制参数设计小结
10、控制参数补偿—传感器补偿
永磁同步电机原理:
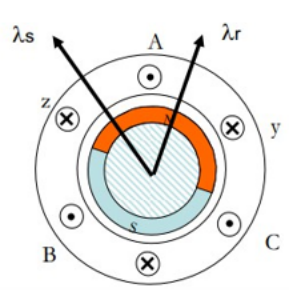
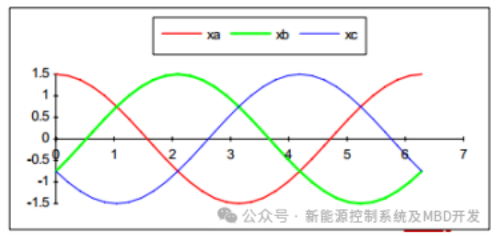
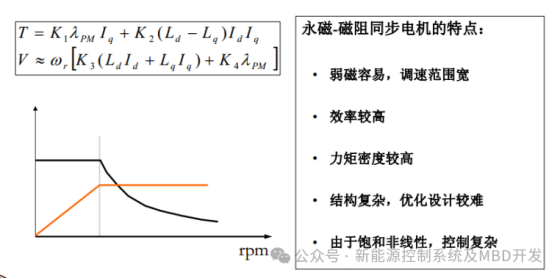
电机控制定义:空间对称分布的三相定子绕组中通入时间对称的三相交流电流,在气隙中产生旋转的磁场,其转速等于交流电流的频率除以电机的极对数, 同时旋转磁场吸引转子上的永磁体产生力矩。
基于模型开发的MBD新能源汽车MCU控制策略+设计文档。
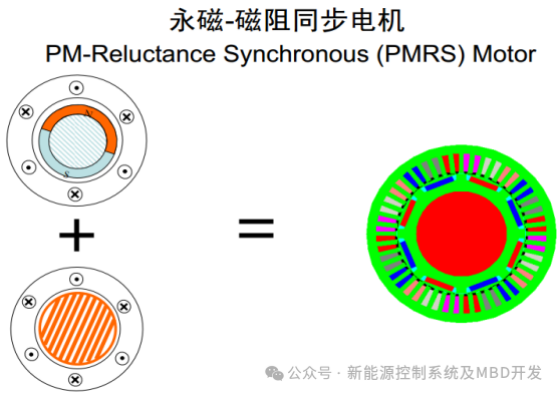
表贴式永磁同步电机特点:
永磁磁阻同步电机特点:
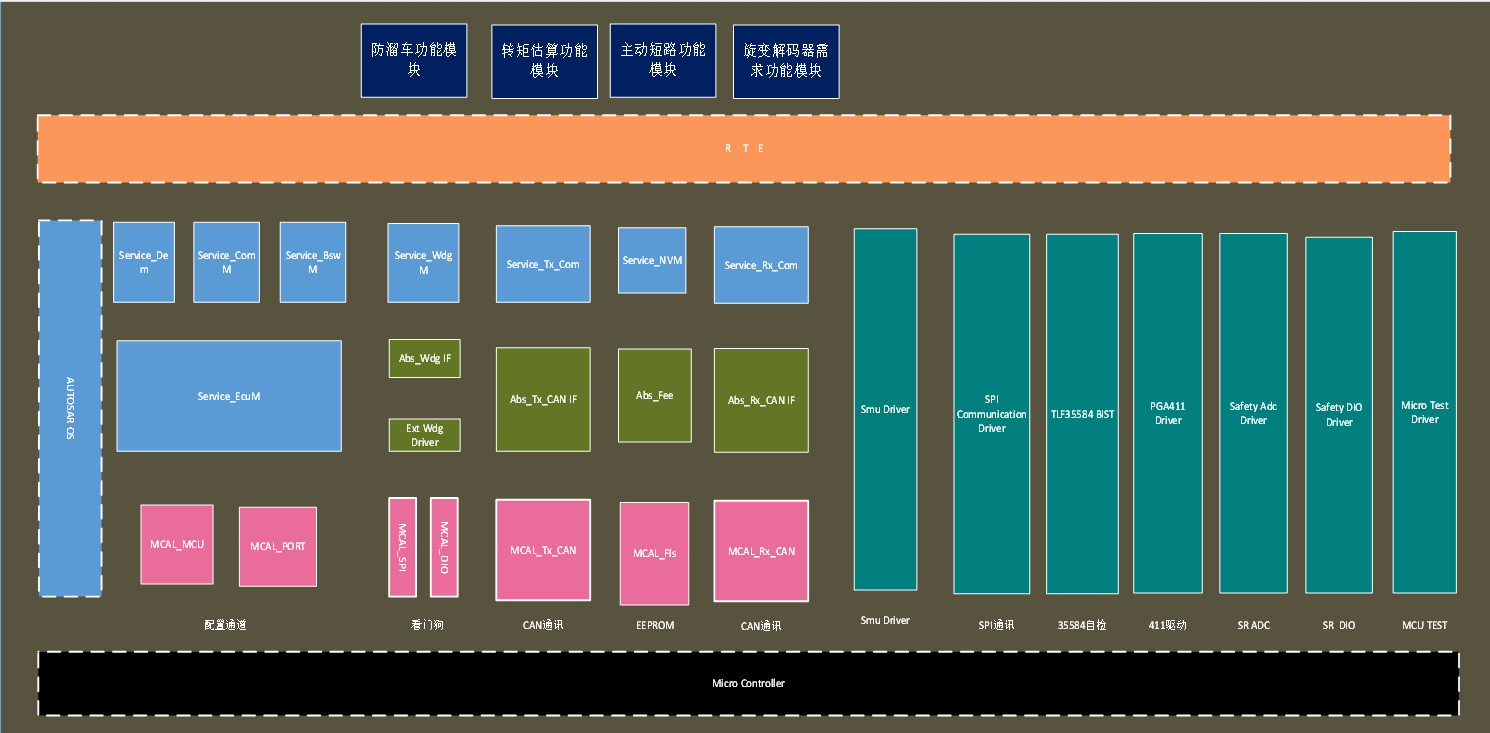
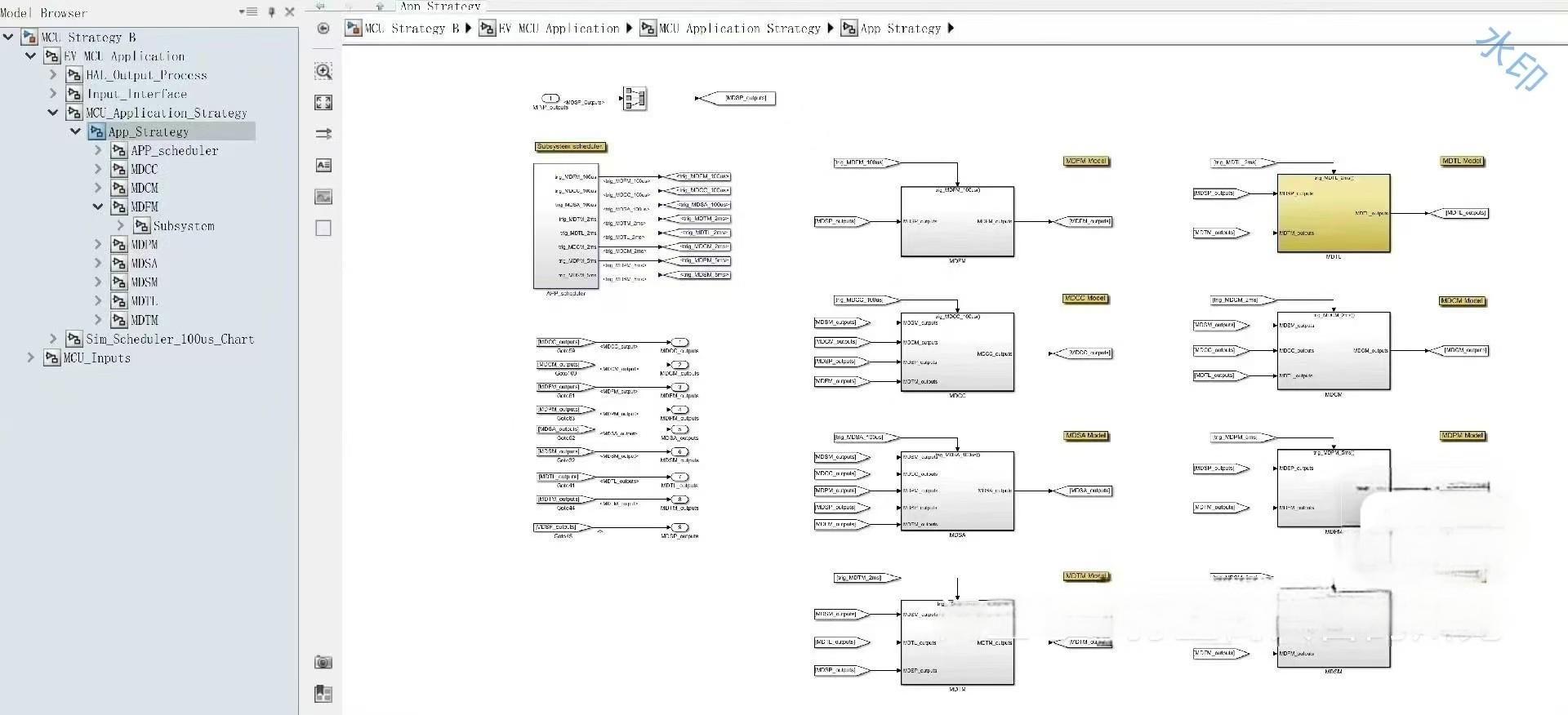
永磁同步电机控制原理:
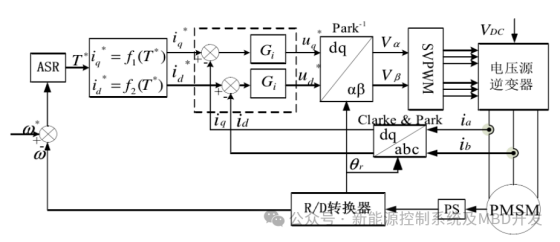
整体架构如上图所示,需要了解的可以百度,各个东西的含义。
控制方法—最大转矩/电流控制 :
永磁同步电机的最大转矩/电流控制(Maximum Torque Per Ampere, MTPA)是一种优化控制策略,其目标是在满足输出转矩要求的条件下,使得电机定子电流最小。
这种控制策略能够最大限度地利用电机的磁阻转矩,提高单位电流的转矩输出能力,从而在输出相同转矩时减小定子电流,降低电机的铜耗,提升系统的整体效率。以下是对最大转矩/电流控制的详细定义和说明:
定义: 最大转矩/电流控制,简称MTPA,是指在恒转矩运行区域,电机在输出给定转矩的条件下,通过调整定子电流的d轴和q轴分量(对于永磁同步电机,d轴通常与永磁体磁场方向重合,q轴与d轴垂直),使得定子电流达到最小。这种控制方法也被称为单位电流输出最大转矩的控制。
实现原理:
电磁转矩方程:最大转矩/电流控制的实现基于电机的电磁转矩方程。通过满足定子电流的条件极值,导出最优的d轴和q轴电流分量。
电流分解:在矢量控制框架下,定子电流被分解为与磁链同方向的励磁分量(d轴电流)和与磁链正交的转矩分量(q轴电流)。通过调整这两个分量的比例,可以实现最大转矩/电流控制。
控制算法: 实现MTPA的控制算法有多种,包括直接公式计算法、曲线拟合法、查表法、搜索法、高频信号注入法以及参数辨识法等。其中,虚拟信号注入式MTPA控制方法因其能够避免实际高频信号注入引起的转矩脉动问题。
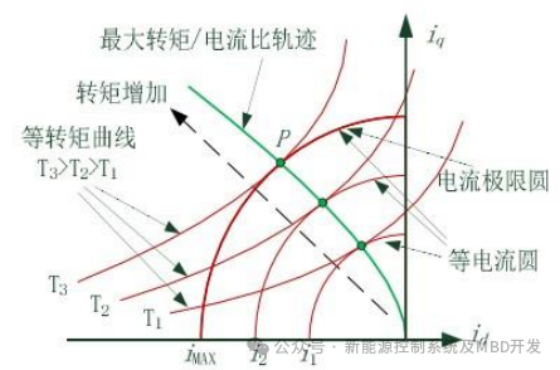
小结:
在矢量控制中,对于每一个给定T,Id,Iq都有无穷多组选择,这些不同选择构成了恒转矩曲线,恒转矩上距离坐标原点最近的点,表明产生该扭矩时,所需最小的电流矢量。MTPA控制策略可将电机,逆变器以及整个系统的损耗降至最低,提高电机效率。
控制方法–弱磁/最大功率控制 :
弱磁控制定义:
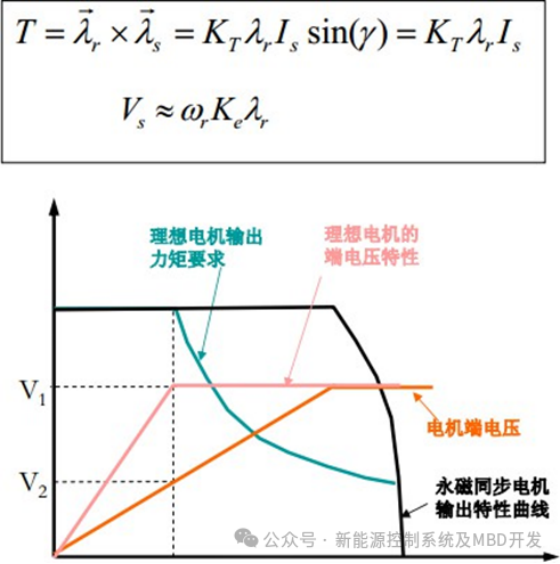
弱磁控制是一种通过减小电机气隙磁通,使电机在高速运行时端电压保持恒定的控制方法。在永磁同步电机中,由于永磁体的磁势无法直接调节,因此通常通过调节定子电流中的d轴去磁电流分量来实现弱磁效果。
弱磁控制原理:
在永磁同步电机中,弱磁控制的目的是在保持输出电压恒定的前提下,通过调节定子电流的d轴和q轴分量来减小气隙磁通,从而降低反电动势,使电机能够在更高的转速下运行。这种控制方法的核心在于利用电机的去磁电枢反应,通过增加d轴去磁电流来减小永磁体产生的磁通。
最大功率定义:
最大功率控制是指在弱磁运行时,通过调整电机的控制参数(如定子电流矢量),使电机在某一确定转速下输出最大功率的控制方法。
最大功率控制原理:
在永磁同步电机的弱磁运行区间,电机的电压极限椭圆会随转速的升高而逐渐缩小。最大功率控制的目标是找到电压极限椭圆上的一点,该点对应的电流矢量能够使电机在该转速下输出最大功率。这通常需要通过复杂的算法和实时控制来实现。
小结:
弱磁控制和最大功率控制往往需要结合使用。通过合理的控制策略,可以实现永磁同步电机在宽调速范围内的稳定运行和高效能量利用。
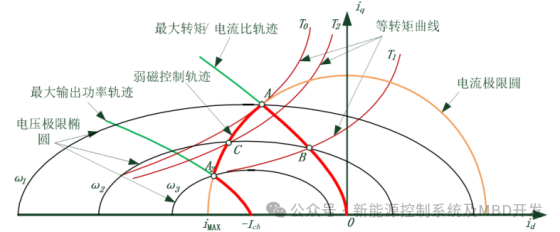
与此同时PMSM的弱磁控制主要是在满足电压极限椭圆和电流极限圆的基础上,调整id,iq,控制电流矢量 轨迹,避免电流调节器饱和,从而使PMSM由恒转矩调速平稳,快速地过度到弱磁工作模式。
控制参数设计—扭矩查表法:
查表法(单张表)
在特定电压下,在台架上对电机进行标定,测试不同转速不同力矩下的Id和Iq表格,并制作成全转速、全力矩下的二维表格烧写到软件中;
根据不同的转速和转矩直接查询Id和Iq的值;
将查表得到的Id和Iq值送入电流环进行闭环控制;
优缺点
基于电机实际标定数据,精度比较高;
动态响应好,无需做额外的弱磁控制;
无法应对电压的波动,在低压状态下,易发生饱和;
无法应对电机一致性偏差引起的性能差异,鲁棒性差;
电机效率较低
优化方法:
重新引入一个电压参数进入查表程序中,根据电压的波动适当的调整查表值。
查表法(多张表)
在电压1下在台架上对电机进行标定,类似于单张表的方法,得到一张二维表格;
依次在电压2至N下重复电压1的操作,形成N张Id和Iq表格;
将这N张表格烧写至程序中,根据转速,力矩和电压查询对应的Id和Iq值;
使用查表得到的电流值参与电流环控制;
优缺点
根据电机实际数据标定,精度高,电机效率高;
动态响应好,控制简单;
能够很好的处理电压波动的问题,
标定量比较大,比较费时;
对芯片的存储空间要求比较高;
无法应对电机一致性差引起的性能下降问题;
控制参数设计—电压闭环查表法 :
在一定电压下,根据控制算法1,标定得到全转速的Id,Iq,MAP表, 将交直轴电压求摸Vs= (根号)𝑉𝑑2 + 𝑉𝑞2;
建立一个PI,将Vs与M*Vdc/ (根号)3做差值(𝑀为电压利用率),通过PI产生一个∆𝐼𝑑;
将此∆𝐼𝑑与D轴电流指令流Id_ref叠加,增大弱磁,进而影响Vs,形成闭环;
建立一个输入Id与T,输出为Iq的二维表格,调整Id的同时,也调整Iq,可以确保输出等力矩;
电压闭环只在Vs较大的时候启用,其他时刻仍然采用查表法;
优缺点:
不依赖于电机参数,控制效果好,电机性能不一致时能够调节输出性能,鲁棒性好;
控制参数设计—电感/磁链参数估计 :
- 在固定电压固定转速下,测试所有的Id,Iq组合的性能,记录当时的Vd,Vq和T;
- 根据定子电阻信息,稳态电压方程和记录的Vd,Vq和T数据,得出Id和Iq对应的电感/磁链表格;
- 将转速、力矩、直流电压三个输入条件带入Id和Iq的理论计算公式,电感Ld和Lq或者磁
- 链𝜔𝑑 和𝜔𝑞 作为参数输入,计算当前状态下的𝐼𝑑和Iq指令;
优缺点
- 基于实际标定的电感/磁链数据,精确度很高;
- 能够应对各种工况下的控制电流适应性问题;
- 电感/磁链表格可以用于转矩估算以及电压解耦的环节,提高这两个环节的性能;
控制参数设计— 磁链闭环查表法 :
- 在固定电压固定转速下,测试所有的Id和Iq组合的性能,记录当时的Vd、Vq和T;
- 根据Vd,Vq求出Vs 除以speed,得到磁链信息;
- 将Id和Iq对应的转矩/磁链二维表格转化为转矩和磁链对应的Id和转矩和磁链对应的Iq表格。
- 将当前的 MVdc/(3speed)作为表格的一个输入,转矩作为表格的另外一个输入,查出当前状态下的Id和Iq。
优缺点
能够适应电压不同导致的电机参数非线性的问题,能够很好地调节电机的性能;
控制参数设计小结 :
- 弱磁控制的核心是在有限的直流电压限制及电压利用率之内,尽可能输出更大的转矩和 功率;
- 各种弱磁算法的目的是为了找出一个合理的Id/Iq指令组合,用于控制,实现预期的性能目标;
- 单张表格/多张表方法是最简单的方法,也是使用最多的方法;
- 单张表/电压闭环是一种性价比比较好的方法,简单又实用,
- 基于电感/磁链查表的算法,能够在此参数基础上拓展很多别的算法,实用性很强;
- 一般查表和电压闭环结合起来实用,既能够得到很好的性能又能够克服电机参数不一致的特性,控制性能更优 。
控制补偿—传感器补偿 :
在永磁同步电机(PMSM)控制器中补偿主要针对电机控制过程中可能出现的误差和失真,包括但不限于电流采样补偿、转速采样补偿、死区补偿以及采样电流偏置误差补偿等。以下将详细介绍这些补偿原因及其实施方法。
电流采样补偿
补偿原因: 电流采样是电机控制中的关键环节,但由于传感器精度、电路噪声等因素,实际采样的电流值可能存在误差。这些误差会影响电机的控制精度和性能。
实施方法:
自动标定法:通过上位机控制恒流源及MCU实现自动标定,上位机设定和检测MCU及恒流源反馈状态,发送对应电流指令,MCU根据电流指令及AD模块采样值计算不同电流下的电流采样系数,并进行补偿。这种方法可以提高电流采样的精确度和效率(参考文章4)。
软件算法补偿: 利用先进的算法(如卡尔曼滤波、扩展状态观测器等)对采样电流进行滤波和校正,以减小噪声和误差的影响。
转速采样补偿
补偿原因: 转速是电机控制中的重要参数,但转速传感器(如编码器)可能存在测量误差,且信号传输过程中也可能引入噪声。
实施方法: PI调节器:通过PI调节器对实际转速和给定转速的差值进行调节,以得到更准确的转速控制信号。
滤波处理: 对转速信号进行滤波处理,以消除噪声和干扰。
死区补偿
补偿原因: 在电机驱动电路中,为了防止上下桥臂直通,通常会设置死区时间。但死区时间会导致输出电压失真,影响电机的控制性能。
实施方法:
基于电流极性的补偿:根据电流极性对输出的脉宽进行增加或减少一个死区时间的补偿。这种方法需要准确判断电流方向,并据此调整补偿量(参考文章2)。
软件算法补偿: 通过复杂的算法模型,对死区时间造成的电压失真进行精确计算和补偿。
采样电流偏置误差补偿
补偿原因: 采样电流偏置误差(CMOE)通常表现为直流偏置,它会在dq电流中引入一次谐波,影响电机的控制精度和稳定性。
实施方法:
PI调节器补偿:传统的PI调节器可以用于提取和补偿直流偏置,但其效果可能受限于滤波性能和参数失配。
扩展状态观测器(ESO)补偿: 采用ESO替代PI调节器,可以有效抑制提取电流中的交流分量,更精准地提取和补偿直流偏置误差。同时,通过自适应带宽调整,可以确保在不同转速下都具有较好的补偿效果。
小结:
- 电流ADC采样, 在FOC控制中,电流精度至关重要,我们一般需要对电流信号进行AD采样转化,所以对ADC的采样精度以及时间要求很高。
- 电流ADC采样尽可能要和位置采样同时发生,两段程序要尽量在执行时间上靠近;
- ADC采样要避开PWM切换的时间点,减少PWM切换时对ADC信号的干扰;
- 三相电流(若有三相)的ADC采样要尽可能同步采样;
- 在芯片支持的情况下,可以考虑多次采样,取其平均值;
- 位置延时,矢量控制是根据角度进行实时运算,由于PWM控制存在周期延时,当前周期的 PWM信号只能在下一个周期才能生效,控制电压命令对应下个控制周期电压的平均值。
- 对于反PARK变换,在转子位置上增加一个角度偏移量,𝜃𝑛𝑒𝑤=𝜃𝑟𝑒𝑠𝑜𝑙𝑣𝑒𝑟 + K*speed;
- K可以通过理论计算得出, 一般按照1.5倍的PWM周期补偿
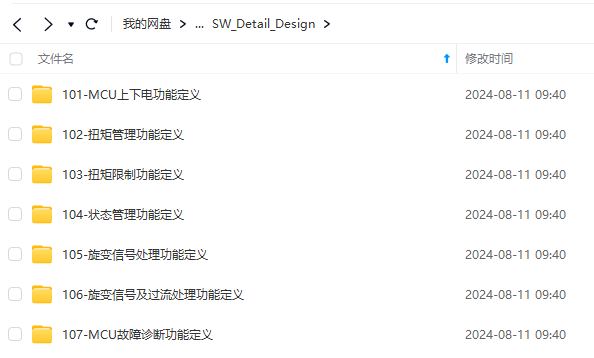
模型分享:
资料内容 : Simulink模型+设计文档
某主机厂量产材料,基于MBD开发的电动汽车主驱电机控制器模型及开发材料,量产模型及代码 ,有需求文件,算法说明,接口文件,软件架构说明。
关联 simulink MCU电机控制策略 svpwm AUTOSAR
喜欢可以自行下载整理学习。

关注本站公众号、加群、获得更多资料。

好东西,但是积分不够,先点个赞
很有用,可惜积分不够,后面来下载
很有用,可惜积分不够,后面来下载
感谢分享
真不错
ADC采样要避开PWM切换的时间点,减少PWM切换时对ADC信号的干扰;
很有帮助,感谢分享!👍👍👍
👍💪👍
资料太好了
太牛了
好东西啊
厉害了值得学习
好东西
👍👍不错!
👍👍👍👍👍👍👍👍👍👍👍👍
👍👍👍
学习学习
厉害👍
💪
👍👍👍
👍👍👍
好东西值得学习😘
大佬厉害厉害
好东西值得学习
👍👍👍👍