
1. 一段话总结
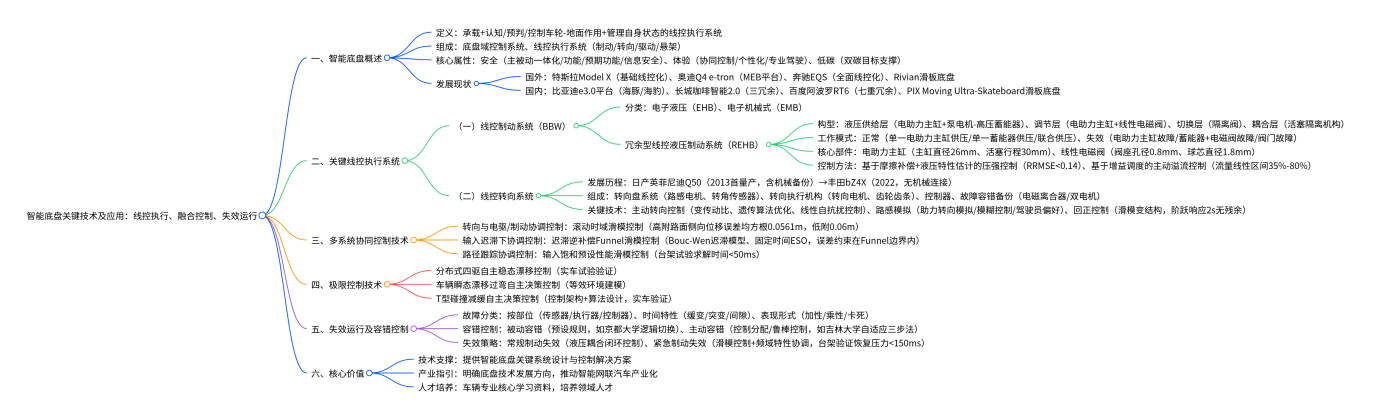
智能底盘作为自动驾驶基石,系统梳理其技术内涵与发展脉络,重点剖析核心线控执行系统(含线控制动系统的冗余构型设计与液压精密控制、线控转向系统的主动转向与路感模拟)、多系统协同控制技术(如滚动时域滑模控制、迟滞逆补偿 Funnel 滑模控制)及失效运行与容错控制技术(故障分类、被动 / 主动容错策略),结合大量仿真(CarSim-MATLAB 联合仿真)与台架 / 实车试验验证技术有效性,可为车辆专业本科生 / 研究生提供学习参考,也为电动汽车领域工程技术人员、科研人员提供技术支撑,助力我国突破国外底盘技术壁垒,推动智能网联汽车产业化发展。
2. 思维导图
3. 详细总结
一、智能底盘概述
- 定义与组成
- 定义:为自动驾驶、座舱及动力系统提供承载平台,具备认知、预判、控制车轮与地面相互作用及管理自身状态能力的线控执行系统。
- 组成:
- 底盘域控制系统:融合传感器数据,实现地面状态感知、精准控制、协同控制及失效控制,推动底盘与车身 / 座舱解耦。
- 线控执行系统:含线控制动、线控转向、线控驱动、线控悬架,以信号传输替代部分机械结构,提升响应速度(较传统提升 30%+)。
- 核心属性
- 安全(第一属性):涵盖主被动一体化安全、功能安全(冗余切换)、预期功能安全(规避功能不足风险)、信息安全(防御未授权操纵)。
- 体验(个性化属性):通过多系统协同提升舒适性、自迭代适配个性化需求、数据驱动提供专业驾驶体验。
- 低碳(战略属性):优化底盘能耗,支撑 “双碳” 目标,如制动能量回收效率提升 15%-20%。
- 国内外发展现状
|
类别 |
代表企业 / 车型 |
核心技术特点 |
|
国外 |
特斯拉 Model X(2016) |
双 / 三电机驱动,基础线控化,集中域控架构(动力 / 底盘 / 车身域) |
|
奥迪 Q4 e-tron(2021) |
MEB 平台,电液一体化线控制动,E3 域集中架构(车辆控制 / 智能驾驶 / 座舱域) |
|
|
Rivian R1S/R1T(2021) |
滑板底盘,四电机分布式驱动,全面线控化(线控制动 + 转向) |
|
|
国内 |
比亚迪海豚 / 海豹(2021-2022) |
e3.0 平台,CTB 技术,博世 IPB 线控制动,基础线控化 |
|
长城咖啡智能 2.0(2021) |
全面线控化(线控制动 / 转向 / 换档),三冗余系统(电源 / 传感器 / 控制器),支持 L4 级自动驾驶 |
|
|
百度阿波罗 RT6(2022) |
星河架构底盘,七重全冗余(架构 / 计算 / 制动 / 转向 / 传感器 / 通信 / 电源) |
二、关键线控执行系统
(一)线控制动系统(BBW)
- 系统分类
- 电子液压线控制动(EHB):含蓄能器式(如博世 SBC,需持续高压,能耗高)、电助力主缸式(分体式如博世 iBooster+ESP hev、集成式如大陆 MKC1)。
- 电子机械式线控动(EMB):取消液压,电机直接驱动制动钳,响应更快(<100ms),但散热 / 可靠性待突破(如 Brembo Sensify 前轴 EHB + 后轴 EMB)。
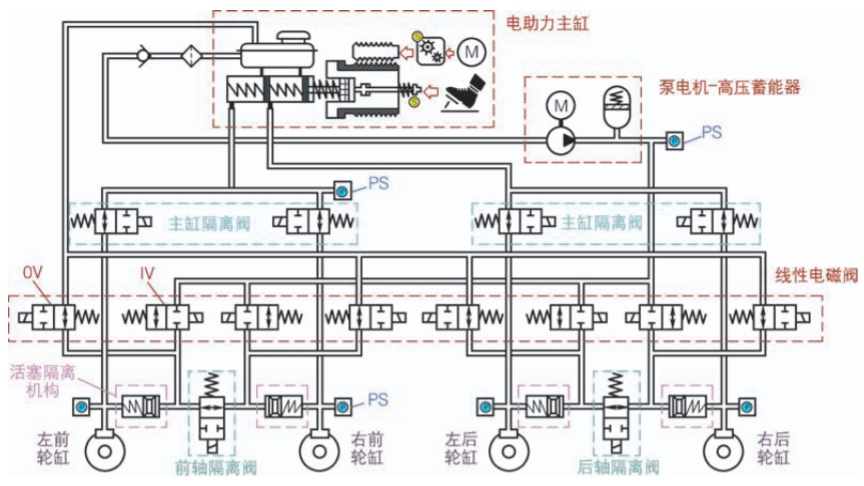
- 冗余型线控液压制动系统(REHB)
- 构型设计:四层架构,实现双重冗余:
- 液压供给层:电助力主缸 + 泵电机 – 高压蓄能器(双重供压)。
- 液压调节层:电助力主缸(非独立调压)+ 线性电磁阀(四轮独立调压)。
- 液路切换层:主缸隔离阀 + 前后轴隔离阀(切换液路拓扑)。
- 液压耦合层:活塞隔离机构(耦合两种液压力)。
- 工作模式:
- 正常模式:单一电助力主缸供压(适配 ACC/RBS)、单一蓄能器供压(适配 ABS/ESC)、联合供压(前轴电助力 + 后轴蓄能器)。
- 失效模式:电助力主缸故障(蓄能器 + 电磁阀接管,400ms 内故障诊断)、蓄能器 + 电磁阀故障(电助力主缸接管)、阀门故障(同侧轮缸连通,保证制动力平衡)。
- 核心部件设计:
- 构型设计:四层架构,实现双重冗余:
|
部件 |
关键参数 |
性能指标 |
|
电助力主缸 |
主缸直径 26mm,活塞行程 30mm |
建压幅值 12.5MPa,响应时间 < 250ms |
|
线性电磁阀 |
阀座孔径 0.8mm,球芯直径 1.8mm |
流量线性区间 35%-80%,Pearson 相关度 0.995 |
-
- 控制方法:
- 电助力主缸:基于摩擦补偿 + 液压特性估计的压强闭环控制,摩擦模型 RRMSE<0.14,失效工况压力恢复 < 150ms。
- 线性电磁阀:基于增益调度的主动溢流控制,结合 PWM 信号(450Hz 调制频率),稳态跟压误差 < 0.05MPa。
- 控制方法:
(二)线控转向系统
- 系统组成与发展
- 组成:转向盘系统(路感电机 + 转角传感器)、转向执行机构(转向电机 + 齿轮齿条)、控制器(双 MCU 冗余)、故障备份(电磁离合器 / 双电机)。
- 发展里程碑:2013 年日产英菲尼迪 Q50(首量产,含机械备份)→2022 年丰田 bZ4X(无机械连接,半辐转向盘)→2023 年特斯拉 Cybertruck(无机械连接线控转向)。
- 关键控制技术
- 主动转向控制:
- 变传动比控制:低速小传动比(10,减轻转向负担)、高速大传动比(24,提升稳定性),基于遗传算法优化,闭环总方差最小(如 50km/h 时优化后闭环总方差 0.8174)。
- 线性自抗扰控制:估计并补偿总扰动,低附路面双移线工况质心侧偏角 < 2°,侧向风扰动时 < 0.2°。
- 路感模拟控制:
- 助力转向模拟:随车速调整助力系数(低速 k_ass=5.6,高速 k_ass=1.2),转向盘最大转矩 4.68N・m。
- 模糊控制:双输入(车速 + 转向盘转角)单输出(路感系数),49 条规则,原地转向转矩 < 1.01N・m。
- 驾驶员偏好:比例系数 k_sw 调节(如 k_sw=0.25 时,25% 助力转向 + 75% 模糊控制)。
- 回正控制:滑模变结构控制,阶跃响应时间 2s,无角度残余,饱和函数削弱抖振(边界层 Δ=0.2)。
- 主动转向控制:
三、智能底盘多系统协同控制技术
- 转向与电驱 / 制动协调控制(滚动时域滑模控制)
- 核心目标:低附路面(μ=0.3)避免轮胎横向力饱和,提升稳定性。
- 技术路径:建立分段仿射车辆模型(3 段拟合魔术轮胎模型),基于无味卡尔曼滤波(UKF)观测车辆状态(侧向位移 / 速度 / 横摆角),优化问题求解时间 < 50ms。
- 试验效果:高附路面侧向位移误差均方根 0.0561m(较 FTSMC 降低 52.1%),低附路面 0.06m(降低 55.2%)。
- 输入迟滞下协调控制(迟滞逆补偿 Funnel 滑模控制)
- 问题:转向系统迟滞(Bouc-Wen 模型)导致控制振荡。
- 解决方案:
- 迟滞逆补偿器:基于 Bouc-Wen 模型,求解转向电机转角,使前轮转角跟踪误差 < 0.02rad。
- 固定时间 ESO:观测集总扰动,0.5s 内收敛至零。
- Funnel 滑模控制:误差约束在 Funnel 边界(如侧向位移 φ_Y0=0.7→φ_Y∞=0.1),固定时间收敛(T_XSC<0.8s)。
- 试验效果:高附路面横摆角误差均方根 0.0112rad(较 FTSMC 降低 39.5%)。
四、智能底盘极限控制技术
- 分布式四驱自主稳态漂移控制:建立 7 自由度车辆模型,决策控制算法实车验证,漂移角度误差 < 2°。
- 瞬态漂移过弯自主决策:等效环境建模(路面 / 车速耦合),仿真验证过弯时间缩短 10%-15%。
- T 型碰撞减缓控制:设计控制架构(感知 – 决策 – 执行),实车试验碰撞速度降低 20%+。
五、智能底盘失效运行及容错控制
- 故障分类
|
分类依据 |
故障类型 |
示例 |
|
发生部位 |
传感器故障 |
轮速传感器测量偏差 > 5% |
|
执行器故障 |
电磁阀卡死无法调压 |
|
|
控制器故障 |
BCU 计算偏差 > 10% |
|
|
时间特性 |
缓变故障 |
制动液泄漏导致压力缓慢下降 |
|
突变故障 |
电机突然断电 |
|
|
间隙故障 |
传感器信号时断时续 |
|
|
表现形式 |
加性故障 |
压力传感器固定偏移 0.5MPa |
|
乘性故障 |
电机转矩系数衰减 20% |
|
|
卡死故障 |
转向电机卡死无法转动 |
- 容错控制策略
- 被动容错:预设规则,如线控转向故障时,电驱 / 制动产生横摆力矩补偿(京都大学方案),但适用工况有限。
- 主动容错:基于故障诊断实时调整控制,如吉林大学自适应三步法(驱动电机失效时,差动转矩保持轨迹跟踪),可应对时变故障。
- 失效运行控制
- 常规制动失效:液压耦合闭环压力控制,回馈制动效率提升 12%,台架试验压力恢复 < 200ms。
- 紧急制动失效:基于滑模控制的滑移率控制(目标滑移率 15%-20%)+ 频域特性协调,150ms 内恢复 7MPa 压力。
六、核心价值
- 技术支撑:提供智能底盘线控执行、协同控制、失效控制的系统性解决方案,填补国内技术空白。
- 产业指引:明确线控化、域控化、冗余化发展方向,助力我国突破国外底盘技术垄断(如线控制转向国内渗透率提升至 20%+)。
- 人才培养:理论 + 仿真 + 试验结合,作为车辆专业核心学习资料,培养智能底盘领域复合型人才。
4. 关键问题
问题 1:智能底盘相比传统底盘(机械 / 电动底盘),核心技术突破点是什么?其对高级别自动驾驶(L3+)的支撑作用体现在哪里?
答案:
- 核心技术突破点:
- 线控化:取消转向轴 / 液压管路等机械连接,以电信号传输控制意图(如线控转向无机械连接,响应速度提升 50%+;线控制动 REHB 实现四轮独立调压)。
- 域控化:底盘域控制器统一协调制动 / 转向 / 驱动,实现纵横向协同(如滚动时域滑模控制使低附路面路径跟踪误差降低 55.2%)。
- 冗余化:硬件(如 REHB 双供压、线控转向双电机)+ 软件(如百度 RT6 七重冗余)冗余,解决单一故障风险。
- 智能化:具备状态自感知(如 UKF 观测侧向速度)、失效自修复(400ms 内故障诊断与接管)能力。
- 对 L3 + 自动驾驶的支撑:
- L3 级:驾驶员部分退出时,底盘可短时间接管(如紧急制动失效时 150ms 内恢复压力),保证安全过渡。
- L4 级及以上:实现 “失效运行”,如百度 RT6 任一系统失效,冗余系统瞬时补位,无需驾驶员介入;REHB 在失效工况下仍保持非降级制动(制动力偏差 < 5%)。
问题 2:线控制动系统中,冗余型线控液压制动系统(REHB)如何通过构型设计与控制方法实现 “双重冗余”?其相比传统 EHB(如博世 iBooster)的优势是什么?
答案:
- REHB 双重冗余实现路径:
- 构型设计冗余:
- 供压冗余:电助力主缸(常规制动)+ 泵电机 – 高压蓄能器(高动态制动),双重压力源。
- 调压冗余:电助力主缸(非独立调压)+ 线性电磁阀(独立调压),互为备份(如电助力故障时,电磁阀接管四轮调压)。
- 液路冗余:主缸隔离阀 + 前后轴隔离阀,故障时切换液路(如阀门故障时,同侧轮缸连通,避免跑偏)。
- 控制方法冗余:
- 电助力主缸:基于摩擦补偿 + RLSE 液压特性估计,应对工况变化(如模式切换时液压特性突变,误差 < 0.35MPa)。
- 线性电磁阀:基于增益调度主动溢流控制,PWM 信号直接调压(无需电流芯片),稳态误差 < 0.05MPa。
- 构型设计冗余:
- 相比传统 EHB(博世 iBooster)的优势:
|
对比维度 |
REHB |
博世 iBooster(分体式 EHB) |
|
冗余能力 |
双重供压 + 调压冗余,支持失效运行 |
仅助力电机备份,无独立调压冗余 |
|
调压精度 |
四轮独立调压,误差 < 0.05MPa |
仅主缸调压,无法独立控轮缸 |
|
失效应对 |
400ms 内故障诊断与接管 |
依赖人力制动,响应 > 500ms |
|
适配工况 |
覆盖 ACC/ABS/ESC/AEB |
仅适配常规制动 + 能量回收 |
问题 3:针对智能底盘多系统协同控制中的 “输入迟滞” 问题(如转向系统迟滞),文档提出的迟滞逆补偿 Funnel 滑模控制方法,其核心逻辑与试验效果如何?该方法相比传统滑模控制(如 FTSMC)的改进在哪里?
答案:
- 核心逻辑:
- 迟滞建模:采用 Bouc-Wen 模型描述转向电机转角与前轮转角的迟滞关系(δ_f = t_SMδ_SM – h_SM,h_SM 为迟滞项)。
- 迟滞逆补偿:设计逆模型 δ_SM = (δ_fd + h_SM)/t_SM,消除迟滞非线性,使前轮转角跟踪误差 < 0.02rad。
- 扰动观测:固定时间 ESO 估计集总扰动(如参数不确定性 / 噪声),0.5s 内收敛至零,提升抗扰性。
- Funnel 约束:设计性能函数 φ_Y (t) = (0.7-0.1) e^(-1.5t)+0.1,将侧向位移误差约束在 Funnel 边界内,结合滑模控制实现固定时间收敛(T_XSC<0.8s)。
- 试验效果(高附路面,车速 90km/h):
|
指标 |
迟滞逆补偿 Funnel 滑模控制 |
传统 FTSMC |
改进幅度 |
|
侧向位移误差均方根 |
0.0561m |
0.117m |
降低 52.1% |
|
横摆角误差均方根 |
0.0112rad |
0.0185rad |
降低 39.5% |
|
误差收敛时间 |
<0.8s |
>1.5s |
缩短 46.7% |
- 相比传统 FTSMC 的改进:
- 消除迟滞影响:传统 FTSMC 未补偿迟滞,前轮转角偏差 > 0.05rad;该方法通过逆补偿,偏差 < 0.02rad。
- 约束瞬态 / 稳态性能:传统 FTSMC 误差易超调(>0.2m);该方法通过 Funnel 函数,误差严格约束在 0.1-0.7m。
- 提升抗扰性:传统 FTSMC 对参数不确定性(如轮胎侧偏刚度 ±50%)敏感,误差增幅 > 30%;该方法通过固定时间 ESO,误差增幅 < 10%。
(注:以上内容由Ai阅读文档后生成,可能存在偏离,精彩内容请自行下载学习。)附赠Ai学习资料盲盒。

有用
学习下
学习下
学习
学习
怎么下载啊
太有用了吧 发
太有用了吧
👍
学习学习