
霍尔传感器的核心通常为硅或砷化镓等半导体材料制作而成的薄片,其中含有大量的载流子,当外部磁场作用于这个半导体薄片时,载流子会受到洛伦兹力的作用而发生偏移,导致在半导体的两侧形成电荷积累,从而产生一个横向的电位差,即霍尔电压。
这个霍尔电压的大小与磁场强度成正比,因此可以通过测量霍尔电压来得知磁场的强弱。又由于霍尔电压的方向取决于磁场的方向,这使得霍尔传感器不仅能检测磁场的强度,还能感知其方向。
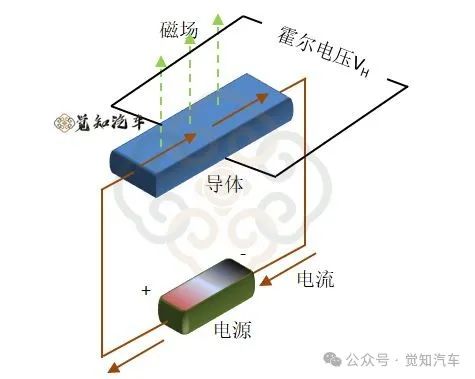
图 1 霍尔传感器基本原理
二、电流检测
2.1. 检测方式
在电流检测应用中,霍尔传感器并不直接检测电流本身,而是通过检测电流产生的磁场来推算电流的大小。即当电流通过导线时,会在该导线周围产生一个磁场,通过放置在靠近这个导线位置的霍尔传感器去检测由电流变化产生的磁场变化,然后据此计算出电流的大小。
由于霍尔电压与磁场的关系是: V H =K H *I*B 。其中, I 为通过霍尔元件的电流, B 为磁场强度, K H 为霍尔系数其与元件的材料属性相关。
在实际应用中, K H 是已知的常数,对于给定的几何形状(如导线周围的磁场分布),磁场强度 B 与电流 I 之间也存在已知的比例关系,因此可将被测电流的计算公式简化为: I= V H /K sensor 。
其中, K sensor 是一个综合系数,该系数通常是通过校准实验确定,并在传感器的数据手册中给出,即该系数最终是个已知的常数。
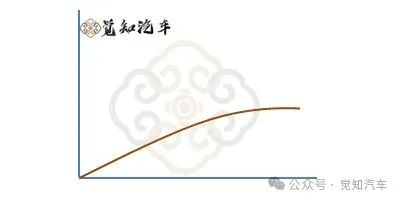
图2 霍尔电压与被测电流的线性关系示意
因此在实际应用中,只需通过霍尔电压即可简单计算出通过的电流值。
2.2. 结构
霍尔传感器在组成上通常包括以下几个部分:
1 )霍尔元件:传感器的核心部分,用于检测磁场并产生相应的霍尔电压。
2 )磁路:用于集中和引导电流产生的磁场,使其更好地作用于霍尔元件上。
3 )放大电路:用于放大霍尔元件产生的微弱电压信号。
4 )输出接口:将处理后的信号传递给控制系统。
2.3. 配置
电流型霍尔传感器通常有开环及闭环两种配置,其中开环霍尔传感器没有内置反馈回路,其直接输出霍尔电压信号,此方式简单但精度较低,常被应用于精度要求不高的场合。
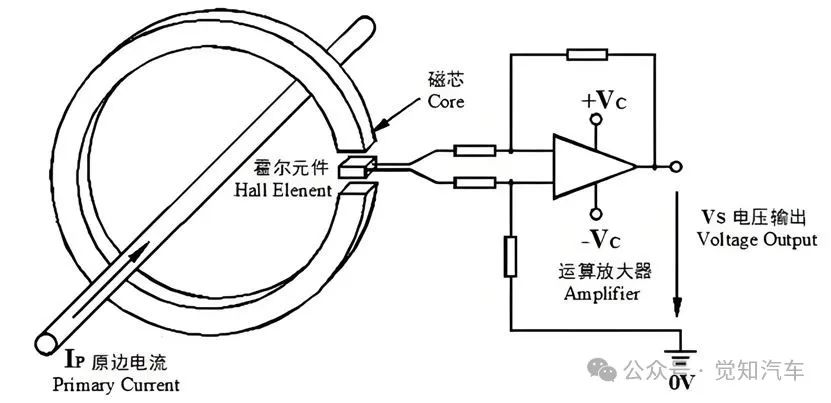
图3 开环霍尔传感器
闭环霍尔传感器具有一个内置的补偿线圈,当检测到磁场时,补偿线圈会产生一个反向磁场,试图抵消原始磁场。在应用时,通过调节补偿线圈的电流,使霍尔元件上的净磁场为零,从而可间接测量原始电流大小,该方式可为系统提供更高的精度需求和稳定性。
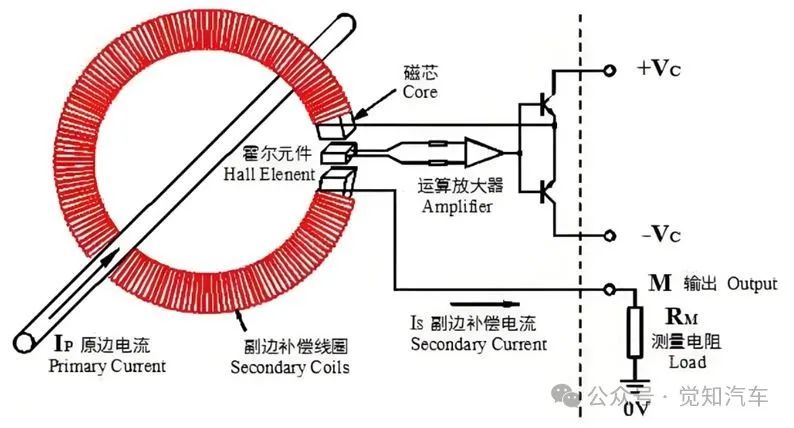
图4 闭环霍尔传感器
2.4. 应用
在一个新能源汽车的 BMS 开发中,可通过安装在动力电池输出线缆处的电流型霍尔传感器对动力电池的输出状态进行监测。即当动力电池向外部用电器供电时,电流通过这条线缆,并会在其周围产生一定量的磁场,此时霍尔传感器检测到这个磁场,并通过内部电路处理后输出一个与电流大小成比例的电信号, BMS 通过读取该信号,并计算实时的电流输出强度。当检测到电流输出过大或过小时,可立即采取相应的措施,以防止车辆出现异常行为。同时,通过监测进出电池的电流大小,可计算电池的剩余电量,可为后续其他应用提供基础数据支持。
三、电机位置传感器的应用
3.1. 原理
在如永磁同步电机的控制中,霍尔传感器常被用来检测电机转子的位置。其工作原理是:通过安装在电机内部定子上并呈 120 °排列的三个霍尔传感器以检测转子旋转时的磁场变化,即当电流通过定子绕组时,会产生磁场,进而推动带有永磁体的转子旋转,转子旋转过程中永磁体产生的磁场会穿过这些传感器,导致它们检测到的磁场强度发生变化,此时霍尔传感器便可通过检测永磁体产生的磁场变化来确定转子的位置。
3.2. 检测方式
当转子旋转时,每个霍尔传感器会 依次 感受到不同的磁场状态,并在检测到磁场变化的同时,输出一个高低电平变化的数字信号,该信号代表了特定的磁场状态,从而反映了转子的位置。
如当转子在某个起始位置时,此时没有传感器检测到磁场变化,因此其输出结果为 000 ,随着转子开始转动,第一个传感器先检测到磁场变化,此时输出变为 001 ,接着第二个传感器也检测到磁场变化,此时输出变为 011 。转子继续转动,第一个传感器不再检测到磁场,输出结果则变为 010 ,随后第三个传感器开始检测到磁场变化,此时输出变为 110 。再接着转动,第二个传感器不再检测到磁场,此时输出变为 100 ,而第一个传感器又开始检测到磁场,则结果开始变为 101 ,最后当转子回到起始位置时,输出再次变为 000 ,由此完成一个完整的旋转周期。

图5 典型转子旋转周期完整信号序列
注:转子在转动时霍尔传感器输出的信号序列中没有“ 111 ”,这是由于我们需要确保转子每次移动一个步进时,信号组合的变化只涉及一位的改变,从而让每个信号组合都是唯一的,并且可以对应出一个明确的位置信息,这可避免因传感器故障或噪声引起的位置误判。
3.3. 位置解码与应用
当使用霍尔传感器进行电机位置解码时,电机控制器首先会通过如扫描传感器输出、逐步驱动、外部信号辅助等方式确定一个参考位置作为起始点(该起始点并不一定是 “000” 状态),并在电机运行过程中持续监测传感器的输出信号,同时记录信号的变化。
在信号发生变化时,电机控制器会根据当前的信号组合来解码转子的位置,如信号从 000 变为 001 时,电机控制器就知道转子已经移动到了下一个预定位置,此时可根据新的信号组合去更新转子的位置信息,并据此调整电机的控制策略。如可根据转子的位置适时地切换相位电流以确保电机的平稳运行,或通过精准控制每个相位的电流以调节电机的转速,再或者可在启动时根据转子的初始位置来初始化电机的运行,并在停止时确保电机平稳减速。
四、其他应用
基于霍尔传感器的应用原理,在新能源汽车的应用上,除了上述提到的应用场合外,还有在如车窗、门的开 / 关 / 防夹等功能上,可通过检测磁铁的位置变化、霍尔电压的脉冲信号输出变化等来判断是否关闭到位或是否有异物阻止关闭。
在制动系统中,霍尔传感器可用于检测踏板的位置或者刹车片的磨损程度,从而确保制动系统的正常、有效工作。同时,还可在车速、齿轮位置、转向角度等多种场合中得到应用。

谢谢分享
好人一胎8个儿子
谢谢分享
66666
首次评论