
分布式四轮独立驱动汽车稳定性控制(说明文档+参考文献+仿真模型)
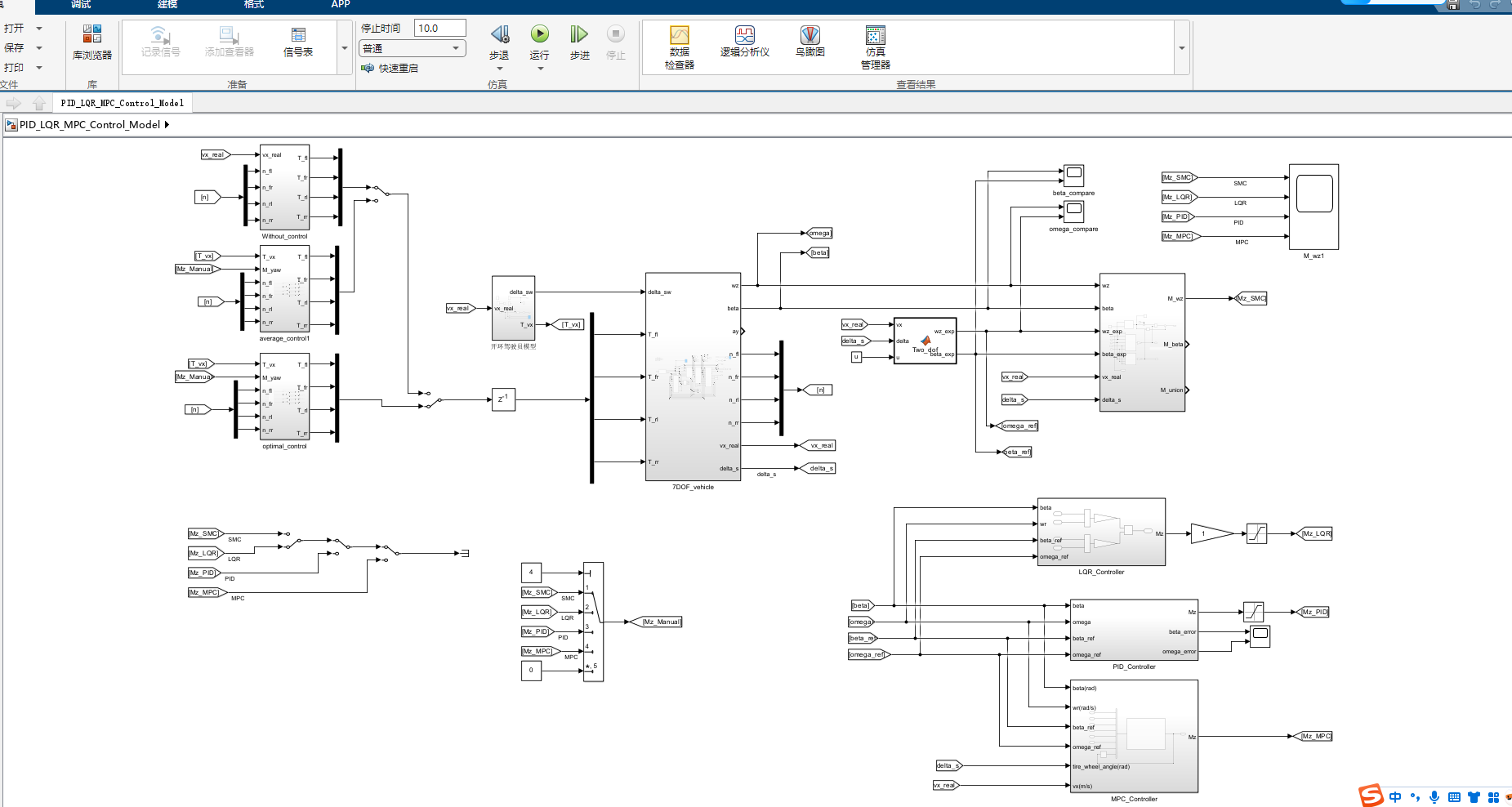
[1]控制策略:采用分层式直接横摆力矩控制
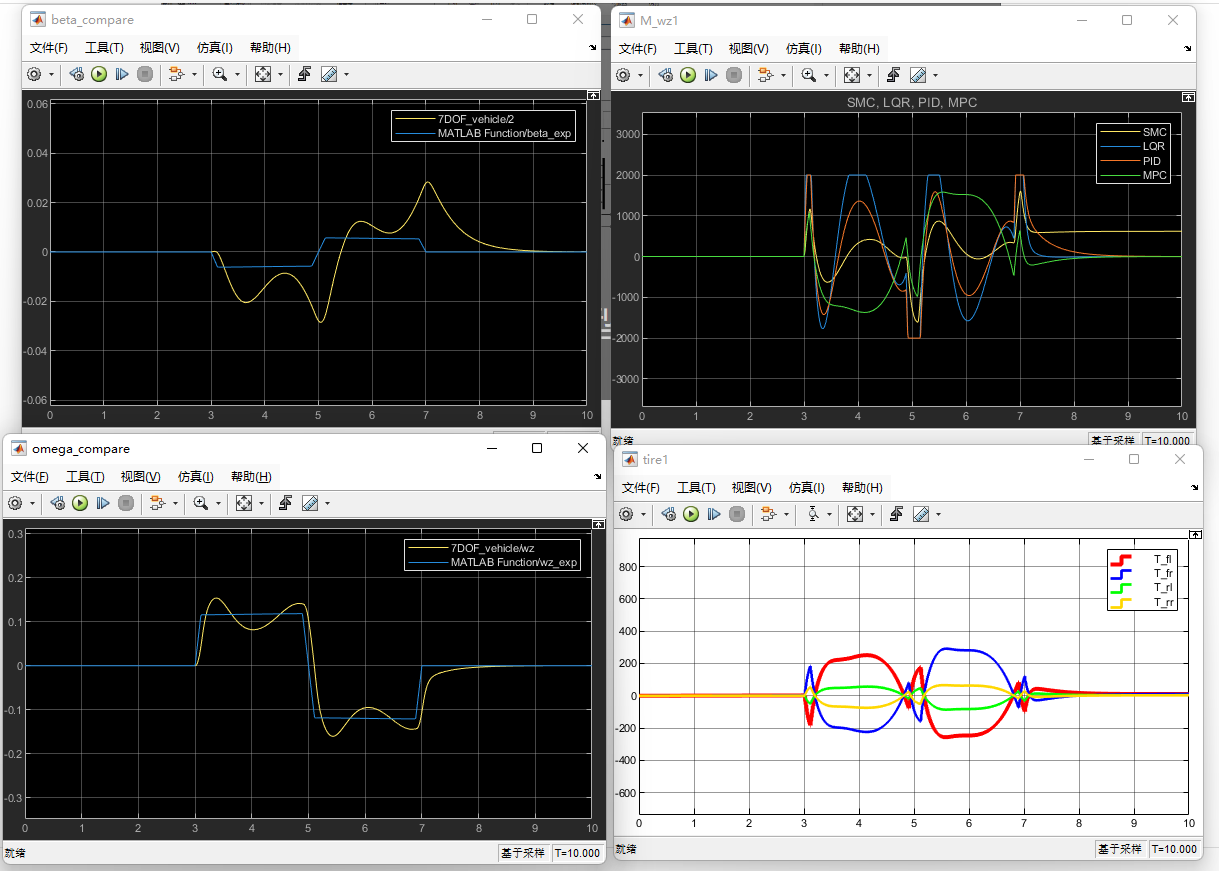
①上层:包括模型预测MPC,滑模控制SMC,PID控制,LQR控制,可灵活对四种控制器对比和选择
②下层:基于轮胎滑移率最优分配。四种控制均可跟踪横摆角速度和质心侧偏角期望值。
[2]车辆动力学模型
①七自由度整车模型:车辆被控对象采用七自由度整车模型输出实际质心侧偏角和横摆角速度,
②二自由度模型:输出理想质心侧偏角和横摆角速度。
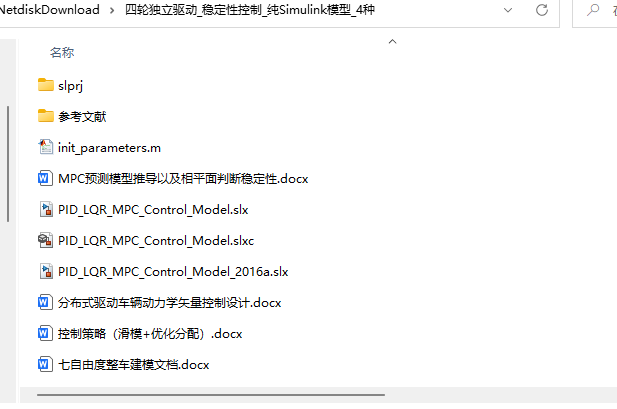
[3]资料内容:
1.纯simulink仿真模型(2018b版本)
2.4份Word说明文档(七自由度建模、MPC模型预测、控制策略、矢量控制设计)
3.附参考文献
4.初始化m文件
声明:本站内容资源均来源于网友分享及网络公开合法渠道,但我们不对这些内容的观点、描述的准确性负责,也不保证所有信息的原创性、真实性、完整性及即时性。对于本站所含文章或资料的版权问题,如您发现有侵犯版权的情况,请联系我们进行处理,或注册本站进行认领。同时,我们提倡将本站内容用于个人学习交流,严禁未授权的商业用途,否则由此产生的法律后果由使用者自行承担。感谢支持!

谢谢分享
积分不够,先收藏了,之后下载
好资料
👍
谢谢分享,学习
牛I·
不错呀,试试复现。
好资料啊
好资料,谢谢
谢谢分享